Abstract
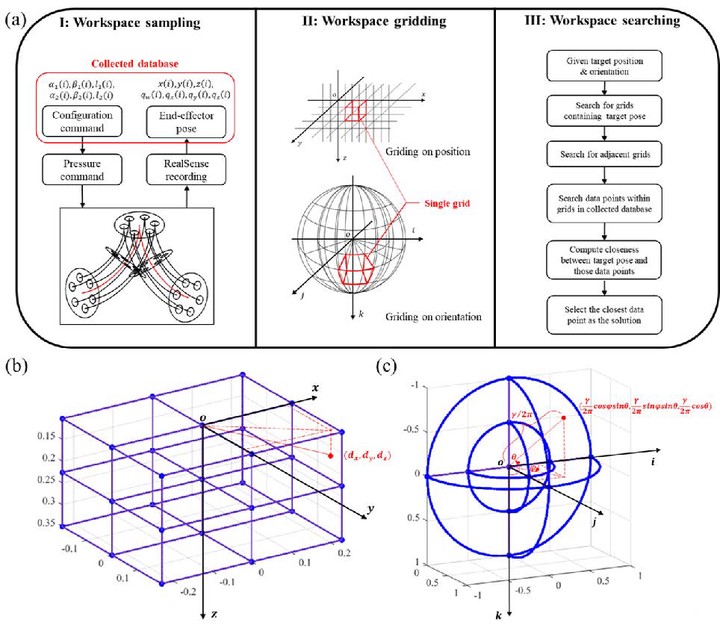
Soft robots, with advantages of high adaptability to the environment, relatively easy and simple fabrication process as well as promising performances, have been thoroughly investigated and widely applied lately, the superiority of which has been proved in areas such as medicine, industry, daily life service and so on. However, it is still challenging to realize stable, efficient, and accurate control of soft robots due to their high compliance and hyper-redundancy. One of the main causes is the difficulty in building an accurate model for analyzing the relation between control input and output (force and/or deformation). In this letter, we proposed an intuitive approach for solving inverse kinematics of soft manipulators, where the relation between actuation pressures and end-effector motions was established by analyzing the sampled workspace from a real platform. A quantitative measurement between control accuracy and computational efficiency was performed and applied in achieving a reasonable balance in between. Based on the proposed approach, real-time motion tracking of a self-developed soft manipulator was implemented on Raspberry Pi taking less than 10 ms and the tracking error was 3.35% of the full workspace in average, comparable to the system capability. Our approach has validated the feasibility of fast searching in finding inverse kinematics solutions with satisfactory accuracy and simple implementation process and demonstrated its potential in working as the basis in advanced control.
Yinyin SU
PhD student in Robotic and Control
My research interests include soft robotics, control and optimization, robotic system and dynamic.
{kind=link}