Foam-Embedded Soft Robotic Joint With Inverse Kinematic Modeling by Iterative Self-Improving Learning
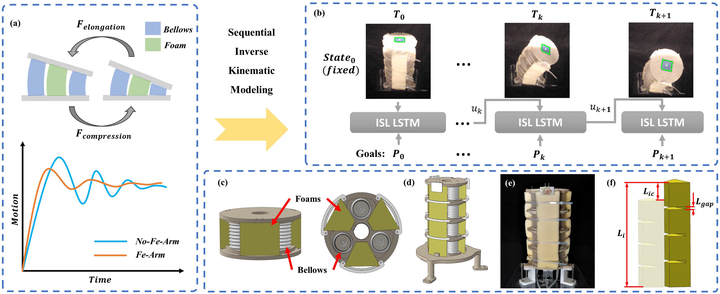 [Overview of the proposed concept and approach for foam-embedded soft robots]
[Overview of the proposed concept and approach for foam-embedded soft robots]
Abstract
Soft robotic arms have gained significant attention owing to their flexibility and adaptability. Nonetheless, the instability due to their high-elasticity structure further leads to the difficulty of precise kinematic modeling and control. This letter introduces a novel solution employing foam-embedded joint design (Fe-Joint), effectively mitigating oscillations and enhancing motion stability. This innovation is integrated into the new continuum soft robotic arm (Fe-Arm). Through iterative design optimization, the Fe-Arm attains superior mechanical performance and control capabilities, enabling a settling state in 0.4 seconds post external force. Enabled by the quasi-static behavior of Fe-Arm, we propose a long short-term memory network (LSTM) based iterative self-improving learning strategy (ISL) for end-to-end inverse kinematics modeling, tailored to Fe-Arm’s mechanical traits, enhancing modeling performance with limited data. Investigating key control parameters, we achieve target trajectory modeling errors within 9% of the workspace radius. The generalization potential of the ISL method is demonstrated using the pentagonal trajectory and on a different Fe-Arm configuration.
Yinyin SU
PhD student in Robotic and Control
My research interests include soft robotics, control and optimization, robotic system and dynamic.
{kind=link}